Beim Monitoring einer Kleinwindanlage gibt es unterschiedliche Ansprüche. Für den einen ist der Erntezähler den man von Zeit zu Zeit ausliest und der direkte Blick auf die Anlage genug, andere wollen die Funktion des Systems genau verfolgen. Ich gehöre zu den anderen. 😊
Die im Folgenden beschriebene Lösung ist so aufgebaut, dass sie von generellem Nutzen für Betreiber einer solchen Anlage ist. Sie ist also komplett konfigurierbar und keine individuelle Lösung fürs Bolbro-Haus. Wer so etwas haben will, kann die Lösung also passend für seine Bedürfnisse anpassen. Der maximale Funktionsumfang richtet sich aber an meinen Wünschen aus - er kann aber auch reduziert werden.
Die Lösung ist eigentlich ein typisches "Maker-Projekt" bestehend aus einem Kleinrechner, Programmierung / Software und eine einfache Hardware-Erweiterung die man selbst löten kann und muss.
Bevor ich die Lösung beschreibe hier der Katalog implementierter Funktionen:
- Auslesen von Wechselrichter und Turbinen-Status
- Auslesen des internen Status der Anlagensteuerung, insbesondere Schaltung von Bremse und Verbindung Turbine / Wechselrichter
- Messung der aktuellen Temperatur einer oder mehrere Bremswiderstände
- Messung der Windgeschwindigkeit
- Integration einer Windvorhersage für die kommenden 48 Stunden
- Analyse des Gesamtstatus der Anlage mit diversen kontinuierlich ablaufenden Selbst-Prüfungen
- Eine lokale oder wahlweise öffentliche Web-Ansicht bzw. App
- Integration einer Web-Cam
- Steuerung von Spots zur nächtlichen Kontrolle von Mast und Rotor
- Weiterleitung aller Statusinformationen an einen MQTT Server bzw. Homeautomation und Energiemanagement
Anders als vollintegrierte Lösungen von der Stange (z. B. der in der Leistungsklasse nicht mehr verfügbare Smart!wind Wind-Wechselrichter), ist die Anlage von Braun ja eine aus diskreten elektrischen Komponenten zusammengebaute Lösung. Der verwendete ABB/Fimer Solarwechselrichter und die Kennliniensteuerung besitzen zwar einfache Schnittstellen, von einer smarten Lösung ist das aber weit entfernt und unvollständig. Wenn man also alles wissen will, muss man Hand anlegen.
Warnung! Das Folgende ist für die allermeisten zu technisch. Wer sich das nicht zutraut meldet sich gerne bei mir oder der Firma Braun.
Das System basiert - wie könnte es anders sein - auf einem Raspberry Pi 4B. Auch (noch) kleinere Lösungen sind denkbar, z. B. könnte man auch eine NanoPi Neo 3 nehmen. So ein Raspberry Pi ist für solche Projekte ideal: das ist ein vollständiges Unix-System das sich per LAN oder WiFi mit dem Netz verbinden kann und es hat eine Vielzahl von Schnittstellen: mehrere USB Ports, ein "One-Wire" Interface und Duzende frei programmierbare Ein-/Ausgabeports über die sich allerlei Mess- und Steuerungsaufgaben erledigen lassen. Weil das System ohnehin viel leistungsfähiger ist als benötigt, kann man zur Programmierung Hochsprachen wie Python einsetzen ohne das System langsam zu machen.
Auf dem Raspberry läuft nun also ein Python-Prozess der rund um die Uhr über verschiedene Threads Daten sammelt, diese integriert, validiert und bewertet. Diese Daten werden dann direkt über einen Web-Server zur Verfügung gestellt oder zur Weiterverarbeitung auf einen MQTT Server geschickt. Da der Raspberry einfach im Netz verfügbar sein soll, habe ich ihn in einem separaten VLAN laufen - böse Menschen können sich so zwar an den Daten erfreuen, aber nicht Schlimmes im restlichen Netz anstellen. Alternativ betreibt man ihn im lokalen Netz und kann dann immer noch per VPN von aussen rein schauen.
Die wichtigste Datenquelle ist die Kennliniensteuerung. Die liefert Daten zu Windturbine und Wechselrichter über einen USB Port. Einmal pro Sekunde. Dieses Schnittstelle ist dokumentiert und kann leicht ausgelesen werden. Komplizierter ist das Auslesen von Status Bremse und Schütz. Realisiert wird das über zwei per Optokoppler galvanisch getrennte Leitungen an die Steuerungseiten der entsprechenden Schaltschrank-Relais. Mein System hat zwei Bremswiderstände, ich habe an beide an der Oberseite DS18B20 Temperatursensoren angeschraubt. Entsprechend kann ich am Raspberry die Werte jederzeit per One-Wire auslesen. Die Abtastung ist hier langsam - Temperaturen ändern sich nicht schnell. Bei der Windmessung zapfe ich den Windsensor der Fledermaus-Box an. Alternativ könnte man genauso den Windsensor der Anlagensteuerung nutzen. Um die System auch hier zu entkoppeln, klaut sich der Raspberry hier bei den Windsensor zunächst komplett. Damit auch die Fledermaussteuerung weiterhin funktioniert, wird der Impuls der pro Umdrehung des Anemometers erzeugt wird wiederum per Optokoppler für einen "Slave" bereit gestellt: die Fledermausbox holt sich also die Daten vom Raspberry.
Die Wind-Vorhersage holt sich das System stündlich von OpenWeather - einer (teilweise) freien Plattform mit Wetterdaten. Die Daten werden stündlich aktualisiert und reichen zwei Tage nach vorne. Mit einem Bezahltarif geht das auch länger und feiner.
Die IP-Cam ist eine weitere Option. Wenn die Cam einen HTML5 / HLS Stream anbietet wird dieser einfach über den Web-Server verlinkt. In meinem Fall läuft auf dem Raspberry noch eine Umwandlung von RTSP auf HLS - die Kamera spricht nur RTSP. Die Übertragung von Live-Bildern ist herausfordernd, aktuell ist die Bildqualität (trotz hochauflösender Quelle) auf der Web-Seite nicht grandios.
Zuletzt habe ich noch die Steuerung von Spots / Flutlichtern integriert. Sie werden über Shellys geschaltet, der Rest ist Software.
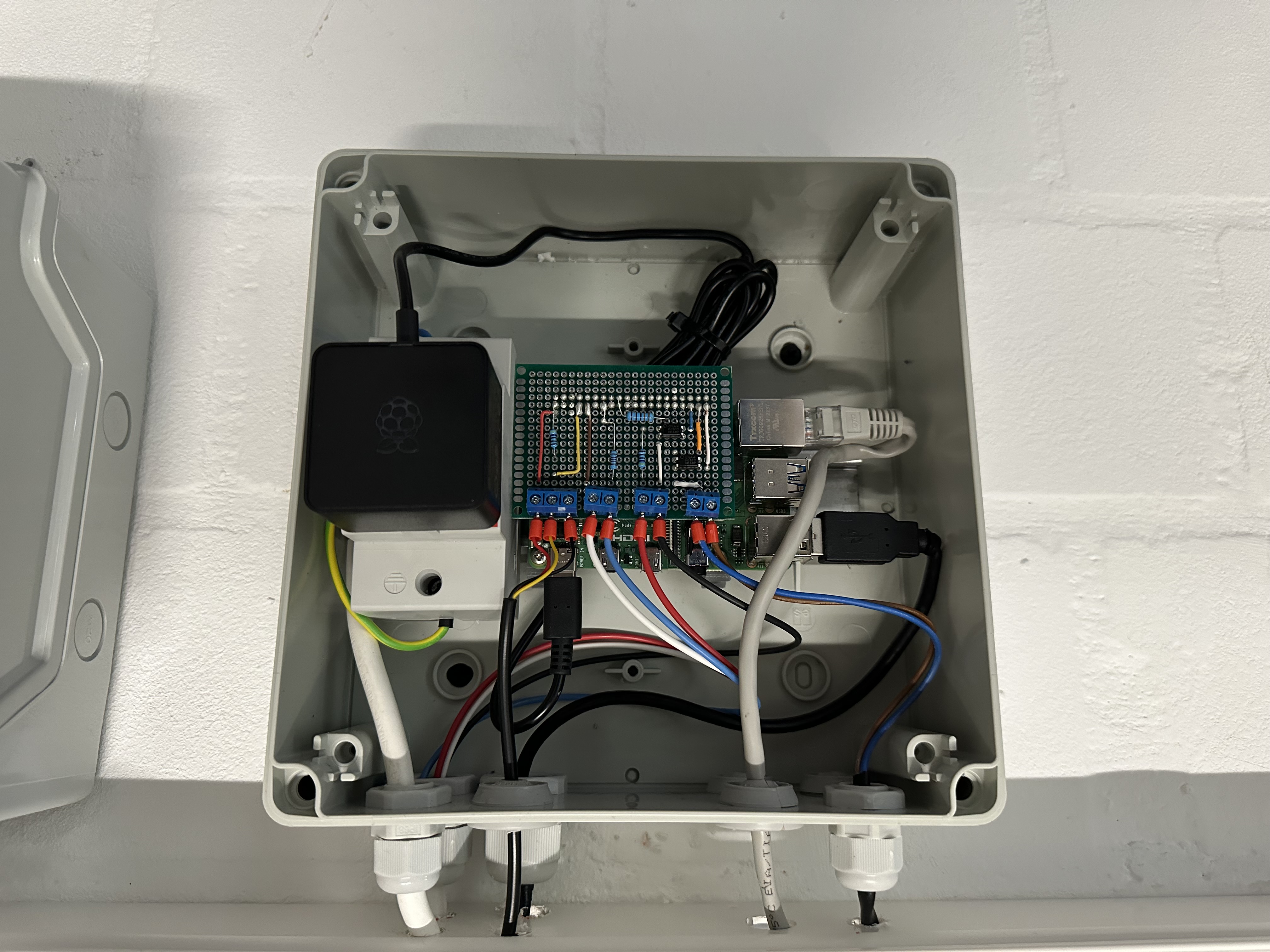
Die einfache Zusatz-Elektronik wird auf die PIN-Leiste des Raspberry gesteckt. Sie hat dann diverse Anschlüsse zum Verschrauben der Leitungen. Das Ganze ist inklusive Netzteil in ein einfaches kleines Aufputz-Verteilerschränkchen verbaut.
Der meiste Aufwand war natürlich die Software, aktuell bin ich auch immer noch am weiter entwickeln.
Wer es bis hier geschafft hat kann sich das System live und in Farbe ansehen: http://windmonitor.bolbrohaus.de
Keine Angst, man kann nichts kaputt machen. 😉
Zurück zur Hauptseite.